2014年07月12日
Raspberry Piでロータリーエンコーダーの動作確認
Raspberry Piで秋月電子で販売されているロータリーエンコーダー(EC12PLRGBSDVBF-D-25K-24-24C-61)の動作確認を行いました。
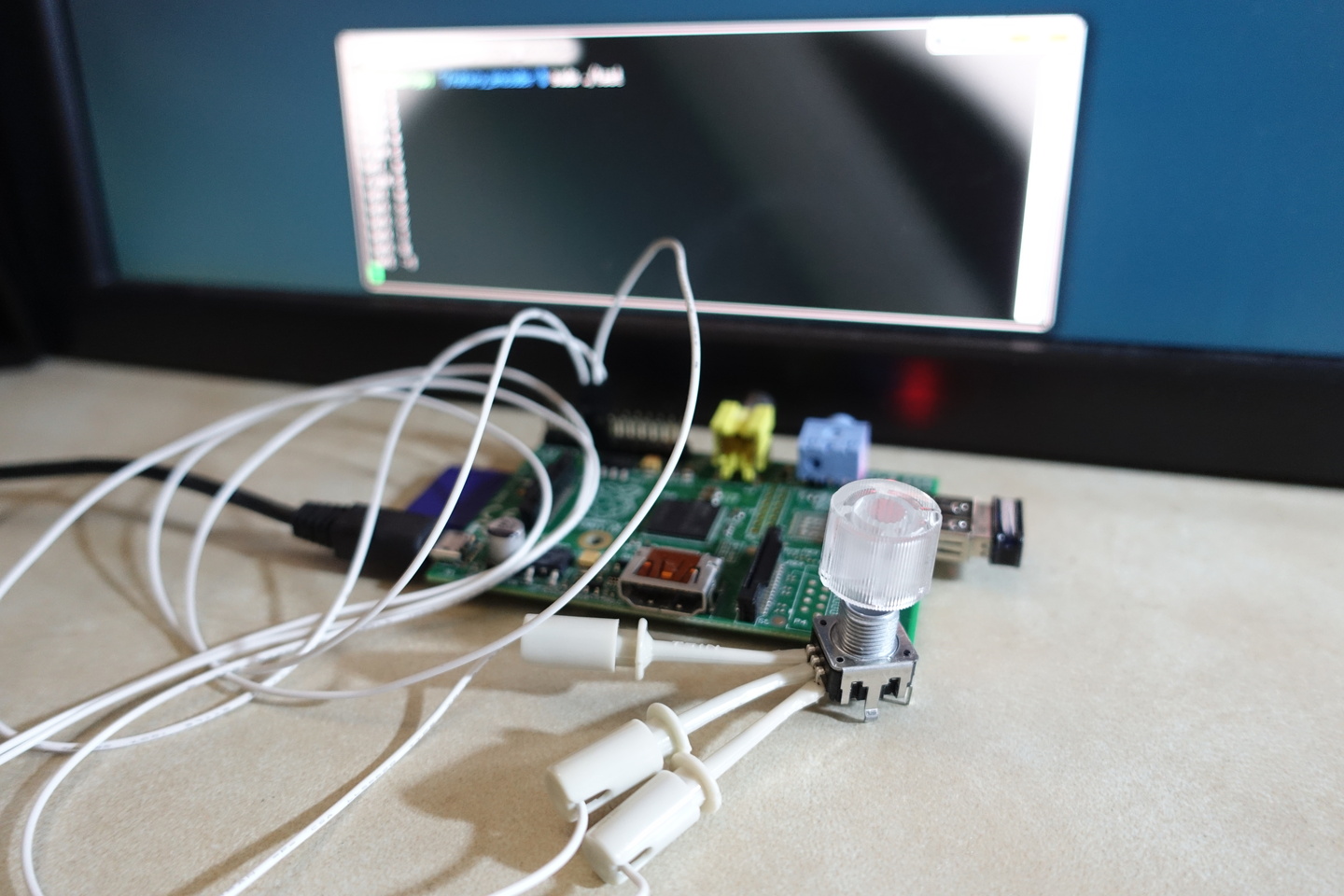
ロータリーエンコーダーの接続
ロータリーエンコーダーとは以下の通り接続を行いました。GPIOはプログラムでプルアップしています。
[RE] - [RaspberryPi] Cpin - 14pin(GND) Apin - 11pin(GPIO17) Bpin - 12pin(GPIO18)
プログラミング
プログラムではwiringPiのwiringPiISR関数を使用しました。この関数はGPIOのレベルが変化した際に指定した関数を呼び出す事ができ、ロータリーエンコーダーの回転に合わせたイベント処理が可能となります。
また、使用したロータリーエンコーダーはクリック機能が付いています。GPIOをプルアップすることにより、何もしていない時はA端子・B端子共にLレベルとなります。回転させるとA端子とB端子がそれぞれHレベルになり、次のクリック位置になると両方ともにLレベルに戻ります。右回転と左回転を識別するには、A端子とB端子のイベントが起こる順番を識別することで可能となります。
#include <wiringPi.h>
#include <stdio.h>
#include <stdlib.h>
int a;
int b;
int p_a;
int p_b;
int num;
void click_a(void){
int _a;
_a = digitalRead(0);//GPIOの値を取得。
if(_a != a){ //同じ値が連続した場合にスキップする。
if(a == 1){ //一つ前のA端子の値を格。
p_a = 1;
}else{
p_a = 0;
}
a = _a;
//a端子とb端子の直前の値が1であり、今の値が0である場合にTRUE。
if(a == 0 && b == 0 && p_a == 1 && p_b == 1){
printf("right %d\n", ++num);
}
}
}
void click_b(void){
int _b;
_b = digitalRead(1);
if(_b != b){
if(b == 1){
p_b = 1;
}else{
p_b = 0;
}
b = _b;
if(a == 0 && b == 0 && p_a == 1 && p_b == 1){
printf("left %d\n", --num);
}
}
}
int main(void){
int setup = 0;
a=1;
b=1;
p_a=0;
p_b=0;
num=0;
setup = wiringPiSetup();
pullUpDnControl(0, PUD_UP);
pullUpDnControl(1, PUD_UP);
wiringPiISR(0, INT_EDGE_BOTH, click_a);
wiringPiISR(1, INT_EDGE_BOTH, click_b);
while(setup != -1){
sleep(1);
}
}
全ての画像